

Ученые MIT печатают на 3D-принтере резвых магнитных роботов
Исследователи из Массачусетского технологического института (MIT) экспериментируют с интересной методикой аддитивного производства роботов, управляемых внешними магнитными полями и демонстрирующих впечатляющую прыть. Поведение роботов программируется во время 3D-печати. Рассказываем, как это работает.
Исследования ведутся инженерной командой под руководством профессора факультета машиностроения и факультета гражданской и экологической инженерии Сюань Хэ Чжао. Опытный 3D-принтер использует технологию робокастинга (Direct Ink Writing) и печатает эластичным материалом, видимо силиконом, насыщенным частицами ферромагнетика.
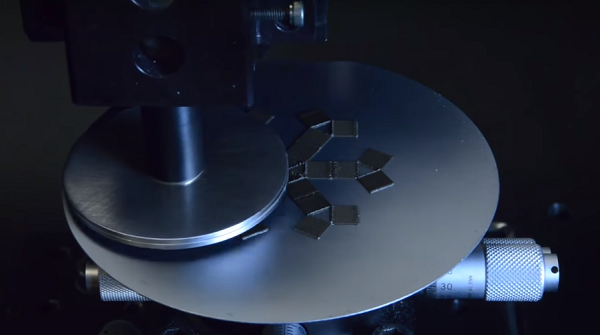
Конструктивной особенностью 3D-принтера является наличие кольцевого электромагнита, окружающего сопло печатающей головки. Электромагнит позволяет произвольно менять ориентацию магнитных частиц на конкретных участках еще не отвердевших слоев, за счет чего и достигается направленное изменение формы готовых 3D-печатных роботов под воздействием магнитных полей.
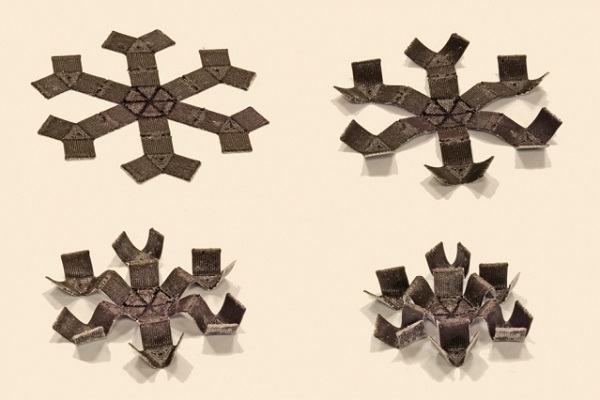
Разработчики шутливо сравнивают роботов с марионетками, только без нитей. Команда изготовила несколько опытных образцов магнитных роботов – сжимающиеся патрубки, складывающиеся листы и кольцо со встроенной проводкой и разноцветными светодиодами. Под воздействием магнитного поля кольцо деформируется, а направление линий определяет, какие светодиоды загорятся – зеленые или красные. Еще один робот отдаленно напоминает паука и способен ползать, перекатываться, подпрыгивать и сворачиваться.

Последний вариант наглядно демонстрирует одну из главных целей команды – разработку дешевых, миниатюрных биомедицинских роботов. Паукообразный вариант способен оборачиваться вокруг таблетки и перемещаться в заданном направлении, демонстрируя возможность точечной доставки препаратов в человеческом организме. Помимо дешевизны и высокой управляемости такие роботы отличаются еще и высокой подвижностью, моментально изменяя форму, что выгодно отличает их от большинства разработок в области 4D-печати.

«Мы полагаем, что в биомедицине эта технология может найти ряд применений. Например, можно установить управляемый жгут вокруг кровеносного сосуда и регулировать поток крови. Либо же запускать робота в пищеварительный тракт для зондирования, сбора образцов тканей или точечной доставки лекарственного препарата. Роботы могут получать самый разный функционал. Нужно лишь спроектировать, провести испытания на симуляторе и напечатать», – рассказывает руководитель проекта.







